功能升级
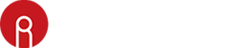
- 新增踝关节驱动
实现髋、膝、踝关节全面的自由组合训练 - 添加把手
增加患者训练的安全感、舒适性 - 可移动床板
更舒适,患者转移更便捷 - 本体感觉评估
三大感应系统,精准本体感觉评估 - 主动运动控制训练模式
深挖掘患者自身的运动功能和运动能力
下肢运动功能障碍是脑卒中、颅脑损伤、脊髓损伤等患者常见的后遗症之一,患者往往无法恢复和准确掌握步行运动技能。以神经可塑性原理为基础的机器人步态训练,能够优化患者大脑运动功能的重塑,达到“积跬步,以至千里”的效果,最终帮助患者重新掌握步行运动技能。